overleaf template galleryLaTeX templates and examples — Recent
Discover LaTeX templates and examples to help with everything from writing a journal article to using a specific LaTeX package.

A quick look at Merkle's puzzles and it's legacy.
Templates for BSc/MSc/PhD thesis or final projects, including flyer and beamer presentation, at Dipartimento di Fisica e Astronomia "Ettore Majorana", Università di Catania, Italy

Como Instalar Ubuntu 18.04 En VirtualBox
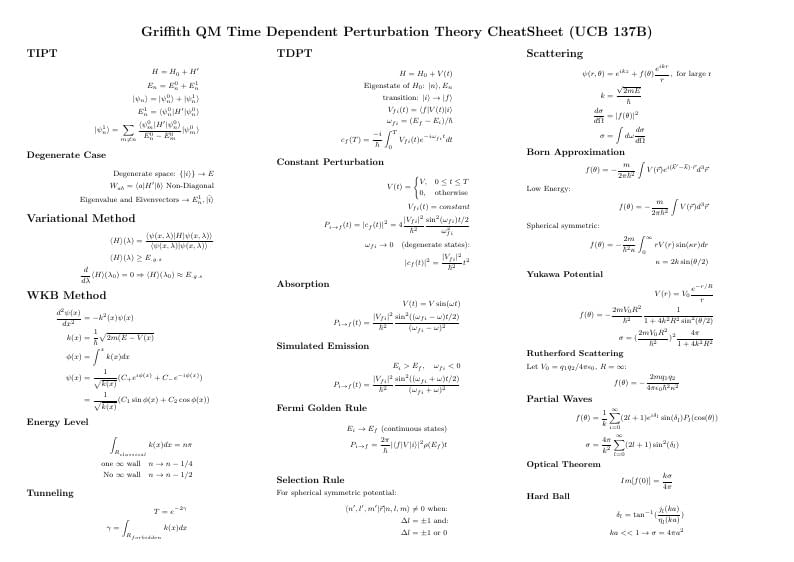
This is a cheatsheet made for the final exam of Berkeley Physics 137B. It mainly covers chapters from Variational Method to the end (except for Adiabetic Approximation).
Une Template belle et pratique pour préparer l'oral de francais.
The second project for MATH 2400, Calculus II, at Fitchburg State. Estimating volume using definite integrals.

In this paper we will study an algorithm designed by Madgwick which is commonly used to determine the orientation of a quadcopter. The algorithm uses a group of accelerometers, gyroscopes and magnetometers integrated in what is called an IMU as input. Some differences have been found between the results obtained by the original paper and the implementation done by the author. Therefore, a thorough study has been made, finding a miscalculation in the equations. The results show a relative average error in the orientation of 1,44 ppm.

La bandera de Sudáfrica fue diseñada por la misma persona que diseñó la de Namibia: el sudafricano Frederick Gordon Brownell quien llegó a ser director de la Oficina Nacional de Heráldica de Sudáfrica. Cuando finalizaba el régimen del Apartheid, se llamó a la población de ese país a un concurso para elegir una bandera nueva que no tuviera relación con la anterior forma de gobierno, pero ninguno de los más de 7 000 diseños recibidos convenció a la Comisión de Símbolos Nacionales. Ante esta situación, se recurrió a Brownell quien presentó varios diseños preliminares hasta que se llegó a la bandera actual, presentada el día 27 de abril de 1994 en la elección que llevó a Nelson Mandela a la presidencia. Como otras banderas, su relación largo/alto es 3:2 y su hoja de construcción y colores aproximados se encuentran en el enlace https://en.wikipedia.org/wiki/Flag_of_South_Africa. Para este diseño, el fondo es de colores Rojo, Ultramarino y Negro y sobre éste hay tres líneas verdes con un grosor de 0.2 veces el alto de la bandera y, mediante la orden \draw [preaction...] se han trazados líneas blancas de grosor 0.33 veces el alto. Para las franjas de color Dorado, se recurrió a dos líneas que se cruzan en el centro de la bandera y que son desplazadas hacia atrás hasta 0.24 veces el largo de la bandera.
Template de Dissertação de Mestrado do PGCC/UEFS - Programa de Pós-Graduação em Ciência da Computação da Universidade Estadual de Feira de Santana.
\begin
Discover why over 25 million people worldwide trust Overleaf with their work.