LaTeX templates and examples — Algorithm
Recent
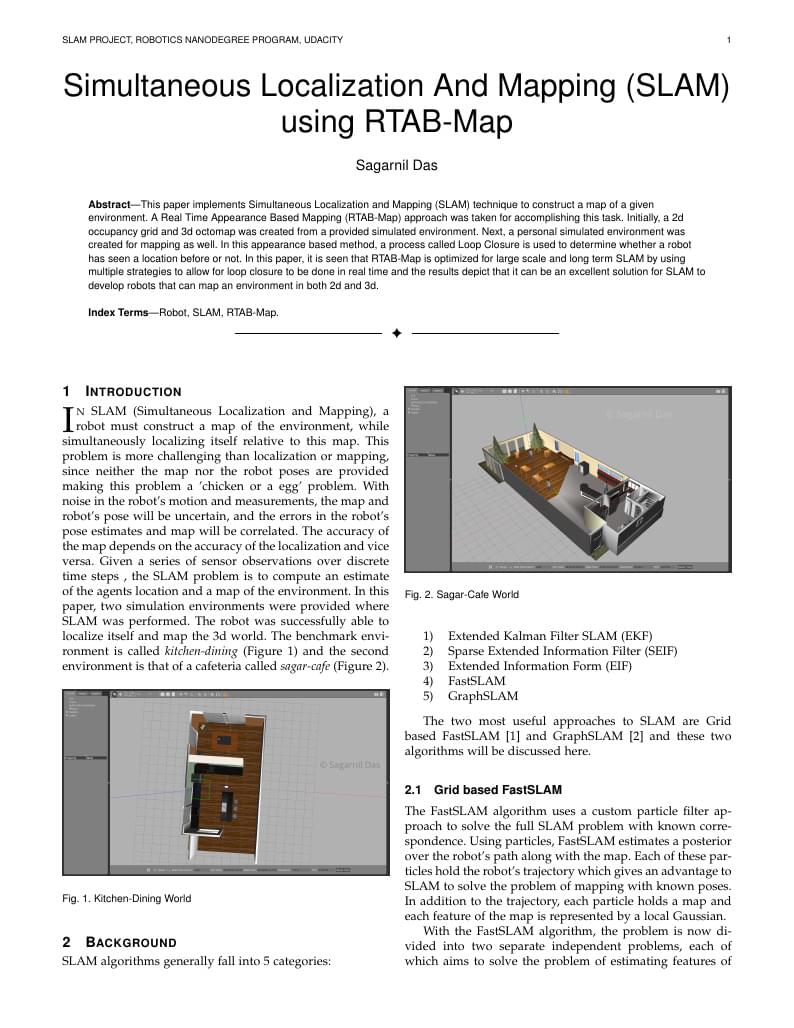
This paper implements Simultaneous Localization and Mapping (SLAM) technique to construct a map of a given environment. A Real Time Appearance Based Mapping (RTAB-Map) approach was taken for accomplishing this task. Initially, a 2d occupancy grid and 3d octomap was created from a provided simulated environment. Next, a personal simulated environment was created for mapping as well. In this appearance based method, a process called Loop Closure is used to determine whether a robot has seen a location before or not. In this paper, it is seen that RTAB-Map is optimized for large scale and long term SLAM by using multiple strategies to allow for loop closure to be done in real time and the results depict that it can be an excellent solution for SLAM to develop robots that can map an environment in both 2d and 3d.
Simple template for Rice COMP 382 Fall 2017.
An indoor positioning system relying on time difference of arrival measurements of ultrasonic pings from fixed transmitters. Code available at https://github.com/YingVictor/ultrasonic-positioning

Considering the growing impact of ideas nowadays, via quaternary sector, the plagiarism detection has become constant in texts, songs, as well as source codes. This work proposes the creation of the tool \nameOfProgram \ for plagiarism detection in simple texts with GNU GPL license. \nameOfProgram \ was designed to allow your extension for plagiarism detection in source codes. The tool was tested and results are presented in this paper.
\begin
Discover why over 25 million people worldwide trust Overleaf with their work.