Recent
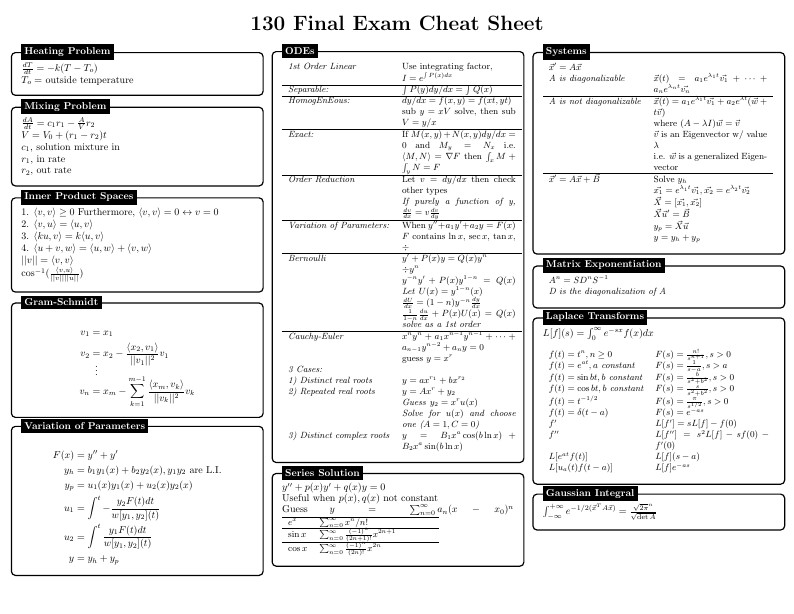
Cheat sheet for Linear Algebra and Differential Equations

homework 8w

First abstract algebra home work.
The last project in Calculus 1 at Fitchburg State. Students work through steps to develop two different formulations of Simpson's Rule for estimating integrals.

Brief description of Gaussian Integral
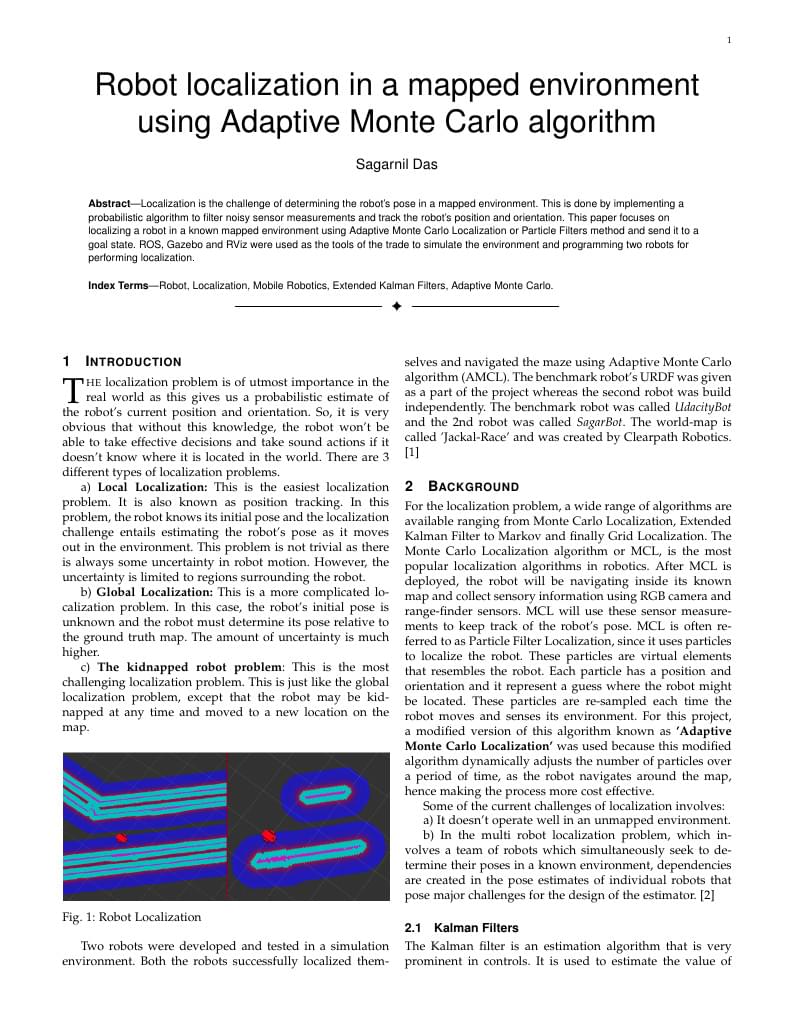
Localization is the challenge of determining the robot's pose in a mapped environment. This is done by implementing a probabilistic algorithm to filter noisy sensor measurements and track the robot's position and orientation. This paper focuses on localizing a robot in a known mapped environment using Adaptive Monte Carlo Localization or Particle Filters method and send it to a goal state. ROS, Gazebo and RViz were used as the tools of the trade to simulate the environment and programming two robots for performing localization.

Solución al segundo examen parcial de álgebra

Solución al tercer examen parcial del curso de Algebra
Senior high school student interested in math, hope to make math friends. lzakaria54@gmail.com
\begin
Discover why over 25 million people worldwide trust Overleaf with their work.