Community articles — Portuguese (Brazilian)
Recent
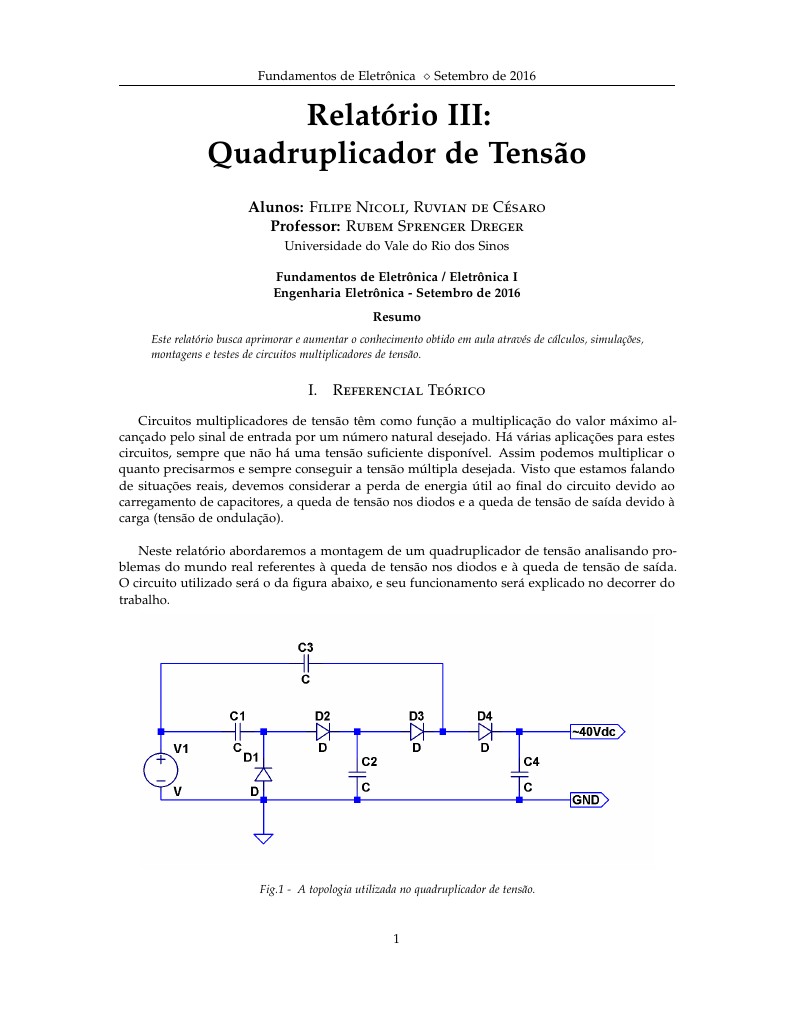
Este relatório busca aprimorar e aumentar o conhecimento obtido em aula através de cálculos, simulações, montagens e testes de circuitos multiplicadores de tensão.
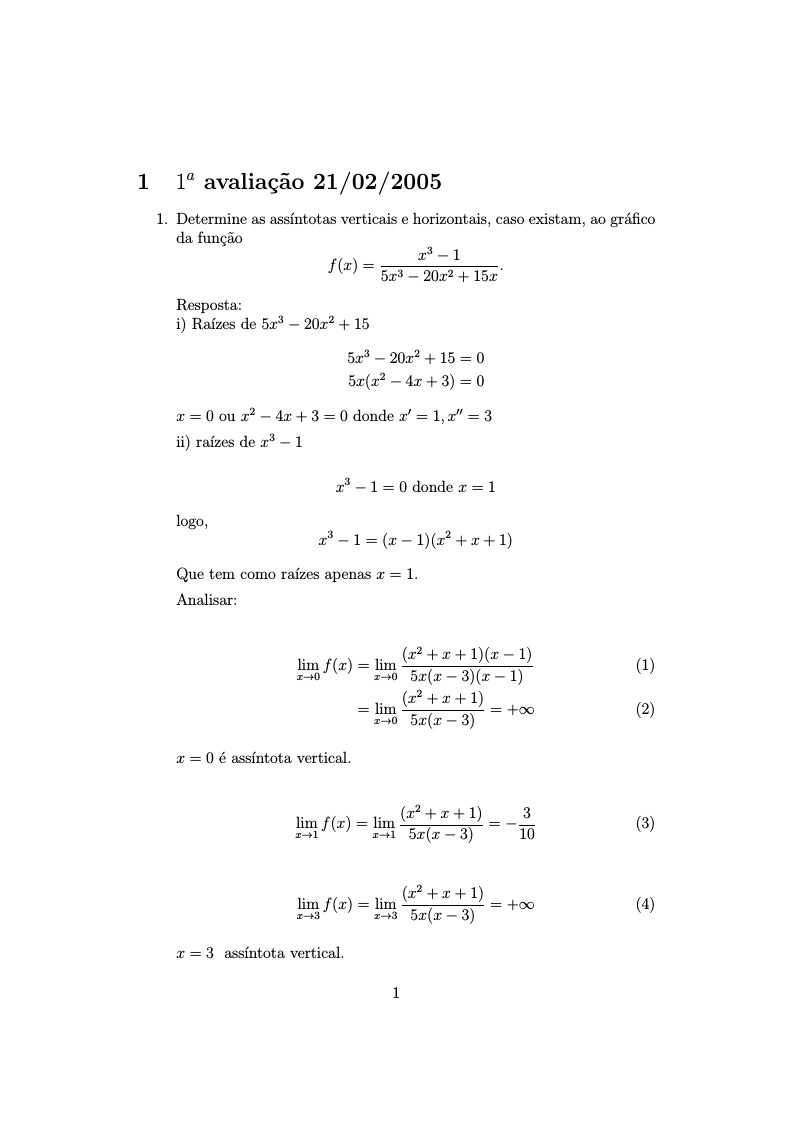
Primeiras questões respondidas do banco de Cálculo 1 da UFAL.
Trabalho de Grupo Cefet
Excerpt from main dissertation
A dinâmica topológica de inversões geométricas foi estudada em [6]. O espa ̧co de parâmetros das medidas de Markov com suporte no atrator do sistema é um aberto de R3 folheado por superfícies de nível compactas definidas pela entropia métrica: superfícies isentrópicas [7]. Neste artigo abordaremos o aspecto geométrico dessas superfícies. Em particular, classificaremos suas geodésicas e pontos umbílicos.
Hadoop versus Spark
Carta pedido de transferência de novo membro entre igrejas Presbiterianas do Brasil
Sermão pregado na Igreja Presbiteriana do Primavera em 27 de setembro de 2015
Série de Estudos Bíblicos sobre as Parábolas proferidas por Jesus Cristo
\begin
Discover why over 25 million people worldwide trust Overleaf with their work.