LaTeX templates and examples — Math
Recent

Lecture note on the Simplex Method
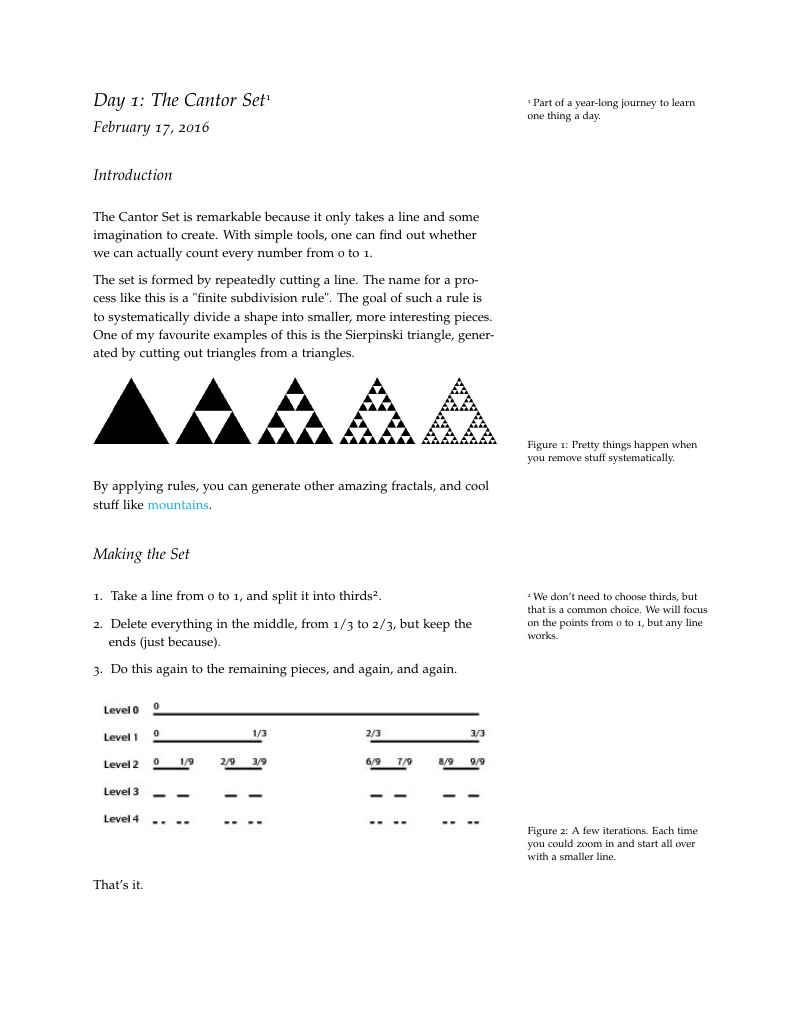
An overview of the Cantor Set and its connection to counting.
PDE-ONE DIMENSIONAL PDE-TWO DIMENSIONAL
My M.Sc project

We develop 3 term-based models(Naive tf, log tf, and BM25), unigram language model, and Pointwise Online AdaGrad approach to select top 100 documents of each query. We use MIN((TP+FN),100) as denominator when calculating AP. We also perform some methods in preprocessing and running stage to obtain better MAP, as well less running time of the whole program. 2 rounds of scanning are needed in our system.

In this work, we investigate the STO as a detector with in-plane geometry using field modulation Spin Torque ferromagnetic resonance (FM-STFMR), during which microwave signal is injected into the device and output response is measured in terms of RMS voltage across lock-in amplifier. The microwave signal injected externally to STO, efficiently synchronizes signal at two times the frequency of free oscillation of the nanomagnet (f0). The synchronization efficiently enhances signal sensitivity at 2f0 which opens other potential for development of spintronic devices. The effect of synchronization in STO under applied input RF power follows a consistent decrease in sensitivity with increasing power. Better synchronization at 2f0 is noticed above threshold current and shows good agreement with the results of numerical simulations.
An indoor positioning system relying on time difference of arrival measurements of ultrasonic pings from fixed transmitters. Code available at https://github.com/YingVictor/ultrasonic-positioning
En esta práctica se utilizarán conocimientos de cinemática para encontrar el valor de la aceleración gravitacional, por medio de dos experimentos diferentes, uno que involucra la caída libre y el otro involucra un péndulo, además, se estimará la confianza y validez de los resultados.

The contributions from conduction, convection, and radiation for an end-heated aluminum rod were quantified with experimental considerations in mind. Multiple experiments were carried out to ascertain various physical properties of the system and the aluminum rod. By applying heat-flow theory, simulations, and data-fitting techniques, the specific heat capacity, conductivity, emissivity, convective heat transfer coefficient of the system, and thermal contact resistance between the power source and aluminum rod were determined.
\begin
Discover why over 25 million people worldwide trust Overleaf with their work.